



热门搜索
- 超多方言实时语音识别
- AIGC
- 语义大模型
- 智能体平台


 新闻详情
新闻详情机器人扎堆儿上春晚?不如直接上滑板!
听说机器人要扎堆儿上春晚
还在跳舞扭秧歌?
TeleAI 表示不如来点真本事 直接上滑板!
从会走、会跳、会跑
TeleAI 让机器人又解锁新技能
业内首次人形机器人
自主完成一整套滑板动作
你是不是开始感叹
已经不如机器人会的多了......
中国电信集团CTO、首席科学家、中国电信人工智能研究院(TeleAI)院长李学龙教授带领 TeleAI 具身智能团队,结合智传网(AI Flow)技术能力,创新研发了一套面向人形机器人的全身滑板控制系统(HUSKY)。
该系统成功驱动 Unitree G1 人形机器人首次在真实环境中完整实现推蹬加速、身体倾斜转向,以及推蹬与滑行稳定切换。标志着人形机器人向复杂动态交互迈出了坚实一步。
融合智传网(AI Flow)的“端-边-云”协同架构,在实际应用中,部署在端侧的模型实时处理高动态任务,边缘和云端模型则针对外部环境进行复杂决策。这既能保障机器人在滑行过程中的流畅性和稳定性,还能针对复杂场景进行智能应变。
回答这个问题之前
先来看看滑板对于人类来说难点在哪?
滑板是一项考验身体平衡的运动,本身无固定支撑、易失衡,且面积狭窄,每一步都需要克服身体的本能反应、建立肌肉记忆并精准控制发力。
并不是每个人都适合玩滑板,它需要玩家彻底掌握自己的身体,并用身体去掌控一个随时会失控的载体,这也正是滑板的核心魅力。
对于机器人来说,滑板本身没有执行器,却受到非完整滚动约束,同时还涉及蹬推、滑行、转向等多个阶段的离散接触切换,构成一套高度复杂的混合动力学系统。
要想完成一整套滑板动作,不摔倒,机器人必须同时攻克三大难题。
稍有偏差,就可能陷入“上得去、下不来”“能蹬不能拐”,甚至“一拐就翻”的窘境。
其实也不是施法啦
就是研究一下物理规律
再拆解任务
TeleAI 科研团队对滑板结构进行深入分析,建立了板面倾角与转向角的约束关系,把“压板转向”从经验技巧变成可计算、可约束、可利用的物理规律。
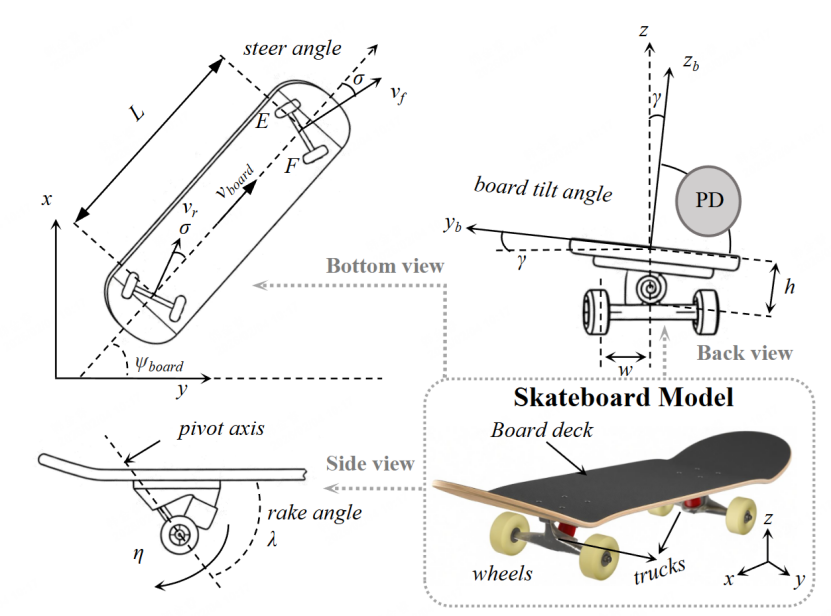
团队还将人形滑板任务明确拆解成蹬推、转向两个循环往复的阶段,并将其视作具有离散接触拓扑变化的混合控制问题。
推蹬:一脚稳住滑板,另一脚间歇触地提供推进力。
转向:双脚站上滑板滑行,通过身体倾斜实现重力转向。
摸清了物理规律,TeleAI 采用了一系列创新训练方法。
让机器人:
像人一样蹬,按物理去拐,丝滑换相位
HUSKY 框架围绕 AMP(对抗运动先验)、物理引导转向、轨迹引导过渡三个部分展开。
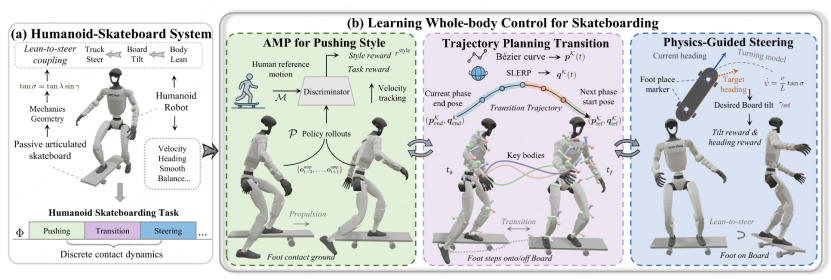
通过引入 AMP,将关节运动与人类推蹬动作先验对齐。不是死板跟踪一条参考轨迹,而是在满足速度指令的同时学出更自然、更可泛化的推蹬动作。
在转向阶段,根据简化的平面车辆模型推导出一个与目标航向误差相关的倾角参考,再用奖励引导机器人去接近这个物理一致的倾斜量。
此外,根据当前阶段结束时的在线姿态,规划一段连接到下一阶段稳定站姿的过渡轨迹,用过程奖励把探索空间“铺一条路”,显著提升相位切换的可学性与可靠性。
面对滑板:
识别软硬材质,以随机化兜底
不同滑板的材质不同,其软硬程度、阻尼大小各有差异,会直接影响“压板转向”和“上板落脚”的可行性。在从模拟环境迁移到真实环境(Sim-to-Real)的过程中,TeleAI 进行了两方面创新。
首先是物理辨识,通过滑板横滚自由衰减相应,识别等效的扭转弹簧,即阻尼参数,把真实滑板的“软硬性格”带回仿真。
其次是域随机化,对摩擦、质心、初始状态等扰动随机化,提升策略对真实环境变化的鲁棒性。
研究团队还开展了系统的定量评估,全面验证该滑板控制方法的技术优势,在仿真评测中实现了 100% 的成功率,部署在 Unitree G1 上后能在真实环境完成连续的“推蹬-上板-转向-再推蹬”循环。
再炫酷点:
不能只会蹬地,还得会帅气上板
玩滑板不只是站在上面滑行,还有一个关键动作:从蹬地加速切换到双脚上板。这个看似简单的“相位转换”,对机器人来说却是巨大挑战。
科研团队做了一个有趣的对比实验,训练了一批“没人教”的机器人,有的只从蹬地姿势开始,有的则随机在蹬地和滑行两种姿势间切换。
无论哪种方式,它们都学不会正确的“上板”动作,要么一直傻乎乎地蹬地,要么脚乱放,根本无法正常滑行。
这个问题就在于缺少了对“转换过程”的引导。TeleAI 团队为机器人设计了一套“轨迹引导”教学方案,手把手教它每个阶段手脚应该放在哪里,身体应该如何移动。
有了这位专业老师,机器人很快就掌握了正确的脚-板接触模式,成功实现了从蹬地到滑行的无缝衔接,彻底摆脱了只会原地踏步的困境。
答案是:相当厉害-请再看一次视频!
当然
人形机器人玩滑板
绝不是为了炫技
研究背后
是对复杂动态平衡、全身协调控制
及智能决策能力的极限挑战
这不仅为机器人掌握更多技能
铺平了道路
也为在非结构化环境中灵活应用
提供关键支撑
这些科幻中的钢铁伙伴
正加速走向真实世界
开启人机共融的新篇章
项目主页:https://husky-humanoid.github.io/
