



热门搜索
- 超多方言实时语音识别
- AIGC
- 语义大模型
- 智能体平台


 新闻详情
新闻详情《光学学报》封面文章 | 李学龙教授团队:AUV 水下回收光学导引
自主水下航行器(AUV)是人类“进入海洋、探测海洋、利用海洋”的重要工具。但在深海作业后,AUV 如何精准对接回收站并补充能源、传输数据,是保障其连续作业的关键。声学导引作用距离远,但精度低,适合远距离初定位;光学导引具有高精度、高隐蔽性的优势,已成为末端导引的研究热点。
近日,中国电信集团 CTO、首席科学家、中国电信人工智能研究院(TeleAI)院长李学龙教授受邀在《光学学报》第 12 期发表封面文章《AUV 水下回收光学导引》,重点讨论各类 AUV 水下回收光学导引技术的实现原理、方法、发展现状与趋势,并详细介绍了基于图像传感器和位置探测器的光学导引技术。

本期《光学学报》封面结合文章主旨,以海洋探测为背景,聚焦海洋中水下 AUV 光学导引回收的应用场景,展现包括多象限面阵光电探测、双目视觉定位、大视场畸变校正、视觉复原增强等水下光场信号处理的关键技术。
AUV 光学导引是水下具身智能和智能光电领域的重要应用方向之一。在李学龙教授的带领下,中国电信人工智能研究院(TeleAI)正在加速推进“智能光电”技术的理论研究和技术应用,并与 AI 治理、智传网(AI Flow)、智能体形成“一治+三智”的完整科研布局。

水下光学导引技术的发展,将为 AUV 的能源补充、数据传输、指令下达提供可靠的技术支撑,在 AUV 具身智能的发展方向带来新机遇。
让 AUV “看”得更清 “算”得更准
李学龙教授团队针对 AUV 水下回收光学导引的研究围绕两大核心技术展开。
第一,基于图像传感器的视觉导引技术
基于图像传感器的光学导引原理是通过捕捉回收站笼口的主动或被动标识物图像,利用图像的特征识别和透视几何计算 AUV 相对回收站的位置和姿态信息,具有导引标识形式不受限制、任务可扩展性强等优点。
其中,被动标识通常使用二维码、几何形状图案等,具备唯一性,但可视距离较近;主动标识则采用光信标、发射光信号,具有更高的可见性,可视距离远。
然而,基于图像传感器的水下光学导引在实际应用中面临水下光场退化畸变、信标特征表征退化、跨域解算泛化受限等挑战。
水下光场在传输过程中呈现非均匀衰减特性,水体介质对光的吸收与散射,导致 AUV 图像传感器捕获图像出现几何失真、对比度降低,有效探测范围缩短。
由于水下信标纹理单一,受光场能量空间再分布影响,水下信标特征点提取与匹配难,进一步增加了基于图像传感器的水下光学导引难度。
同时,水下光场的折射率与盐度、浊度参数存在强耦合效应,导致成像系统在不同区域的位姿解算误差呈非线性变化,使水下光学导引算法的泛化性受限。
为此,研究团队基于水下光场调控理论,构建了融合偏振成像与动态曝光的双目视觉光学导引系统,从而实现复杂涉水视觉环境中的高精度目标定位。
建立了偏振差分成像的水下目标增强模型,构建 Stokes 矢量空间的水下光场解算体系,通过多偏振通道信息融合,有效抑制散射噪声,显著目标对比度。
设计了基于光场强度分布的自适应曝光控制策略,通过建立距离-曝光时间标定曲线,实现了动态曝光补偿,显著提升了水下光学导引系统的环境适应性和定位精度。
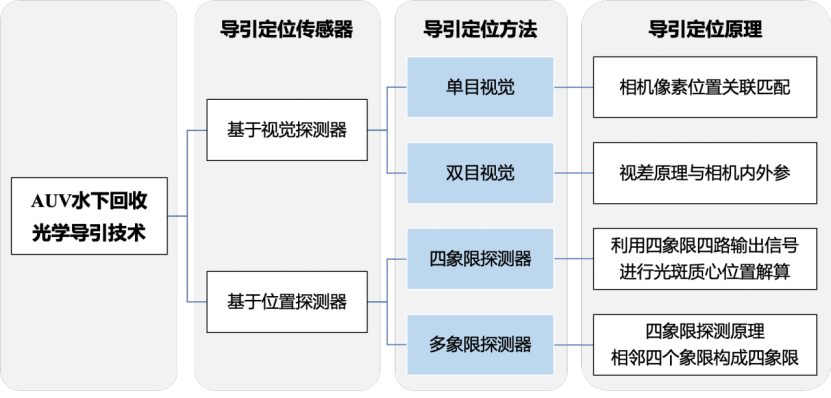
第二,基于位置传感器的光学导引技术
基于位置探测器的光学导引原理是利用光学信号处理方法,确定光斑在位置探测器光敏面上的质心位置,进而实现目标精确定位的技术。
该技术主要应用在两个方面:
首先,是激光照射待测目标后,位置探测器通过检测反射光斑在光敏面的位置变化,计算其质心移动,从而精确计算被测目标的线位移或角位移。
其次,是位置探测器解算出的光斑质心位置,为电机或快速反射镜等执行机构提供脱靶量,实现实时动态跟踪。
这两方面应用的核心都是对照射到位置探测器的光斑质心进行实时测量,因此光电位置探测器的光斑位置检测性能对测量精度十分重要。
常用的光电位置探测器包括位置敏感探测器,电荷耦合器件和四象限光电探测器。其中,四象限光电探测器是将一块光电探测器按照笛卡尔坐标系分成四块,对应探测器的四个象限,利用光刻技术制备的。
当入射光斑落入光敏面的不同位置时,各象限会输出不同强度的电信号,通过处理四个象限输出的信号强度,可以确定光敏面上入射光斑的质心位置,具有检测分辨率高、响应时间短等优势,常用于光电测控通信领域。
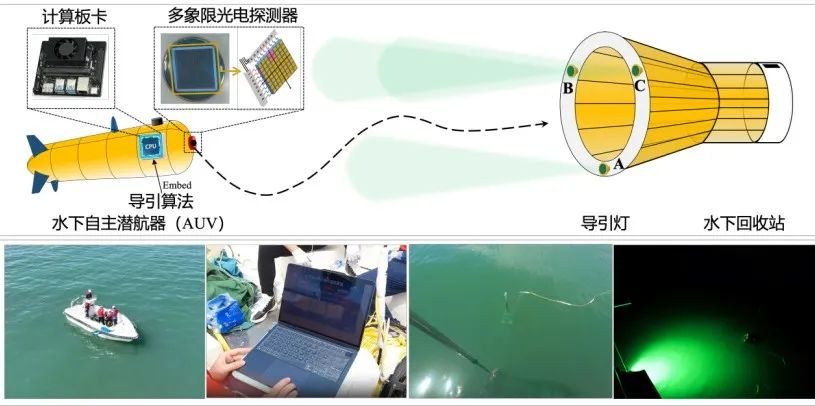
研究团队创新提出了智能光电探测导引硬件与算法一体化设计的多象限测角光学导引定位方法,采用硬件-算法协同优化架构,通过多象限光电传感器阵列与深度学习技术的深度融合,实现了 AUV 水下回收的大视场高精度光学导引定位。
通过对绝对坐标误差进行计算和统计,AUV 位置坐标解算速度 5.650ms/次,定位解算频率从 30Hz 提升到 170Hz,坐标解算误差均值为 58.292mm@0.8∼20m,最佳平均坐标解算误差从 30mm 降低到 7.2mm@2∼3m,保障了 AUV 水下回收 99% 的成功率。
与现有光学导引方法相比,本研究的解算速度更快,算力功耗需求低,能量消耗少,为 AUV 完成能源补充、数据传输、指令下达,提供了可靠的导引回收方法,为复杂涉水视觉环境中AUV精准回收提供了新的技术范式。
地球表面约 71% 是海洋,大海不仅面积广阔,且深不可测。从海平面到水下 1000 米是临地空间的一部分,这里物种多样,矿产丰富,是人类“向下”拓展的重要空间。
通过智能技术与光电技术的结合,TeleAI 目标打通包括赛博空间、临地空间、广域空间在内的“AI 驱动的三大空间经济”,不断拓展人类的认知和活动边界。
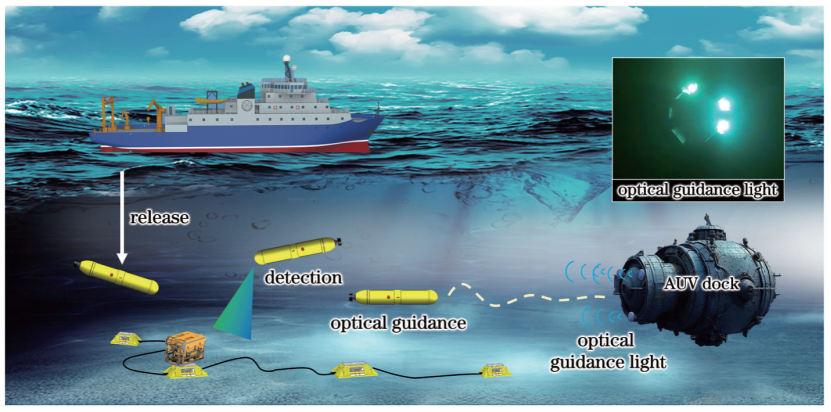
在海洋作业智能化进程加速的背景下,构建具备自主决策能力、高频实时响应特性和多源融合优势的新一代水下智能导引系统至关重要,将为深远海无人装备集群化作业提供有力支撑。
基于图像传感器的光学导引方法具备信息获取直观、定位精度高的特点,是目前 AUV 水下回收光学导引的主流方法;而基于位置探测器的光学导引方法,探测速率高、定位精度高,为通信探测一体化的应用带来了广阔前进。